Mechatronics Engineering graduate passionate about designing and programming robotic arms for automation.
Graduated in July 2025 from the University of Nottingham Malaysia with a Bachelor of Engineering (Hons) in Mechatronics Engineering.
Projects
Completed engineering projects during academic including line-following car, spring-powered cart, disc brake, Bytronic ICT3 and robotic arm, and drone-based environmental monitoring.
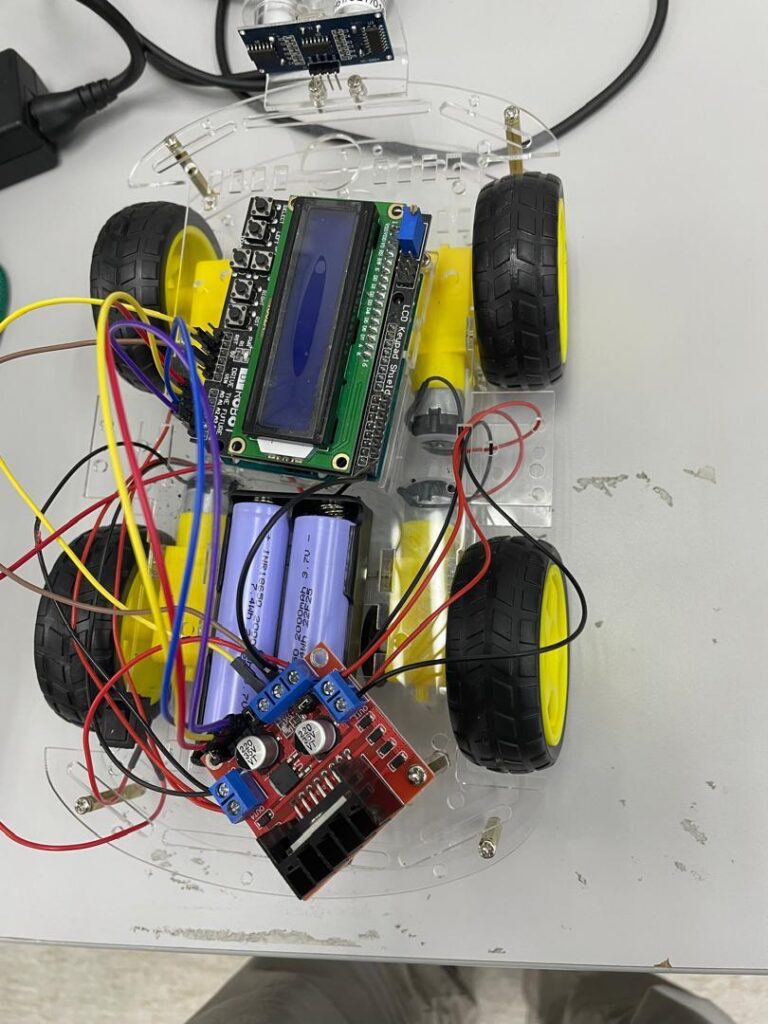
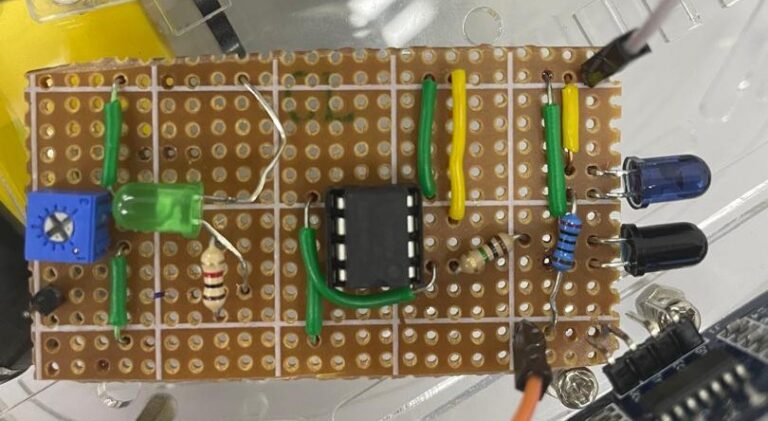
Line following car
Equipped with custom-built IR sensors to detect surface infrared radiation, along with motor driver, battery, and Arduino Mega. An ultrasonic sensor was also integrated to measure the distance from walls to avoid collision.
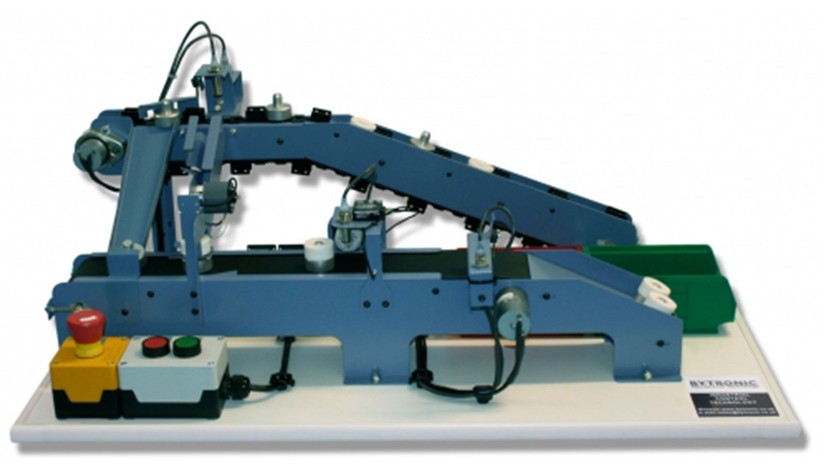
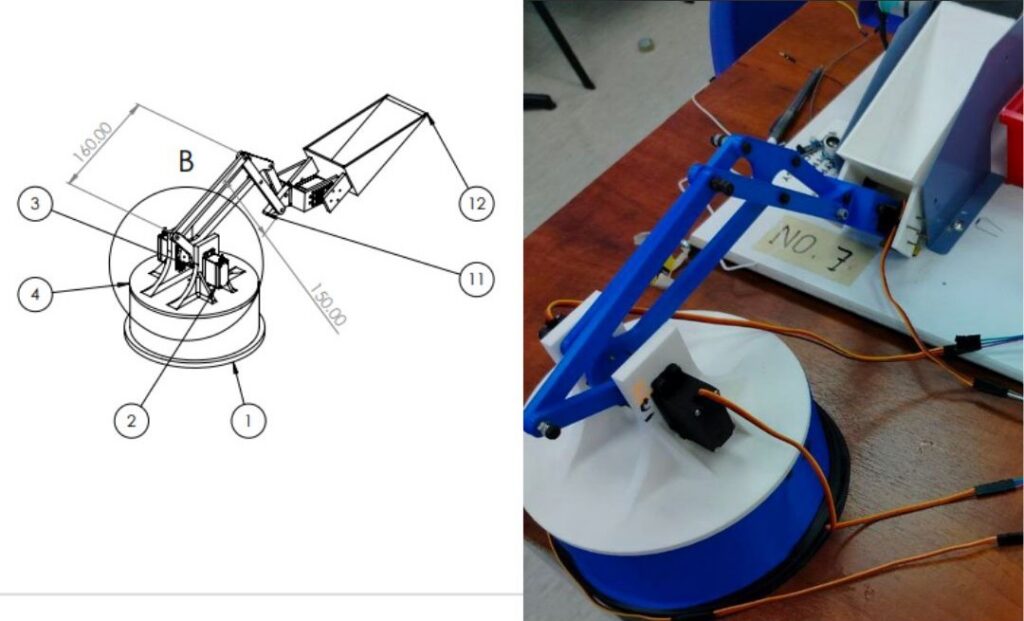
Bytronic ICT3 and Robotic Arm
The bytronic ICT3 is controlled by Arduino Mega andequipped with infrared and inductive sensors to inspect assemblies. This allows the correct units to pass through while the defective units are automatically rejected.
Designed in Solidworks for lightweight and equipped with servo motor to control its movement precisely. This robotic arm will pick up the assembly from the Bytronic ICT3 and places it carefully to its designated area.
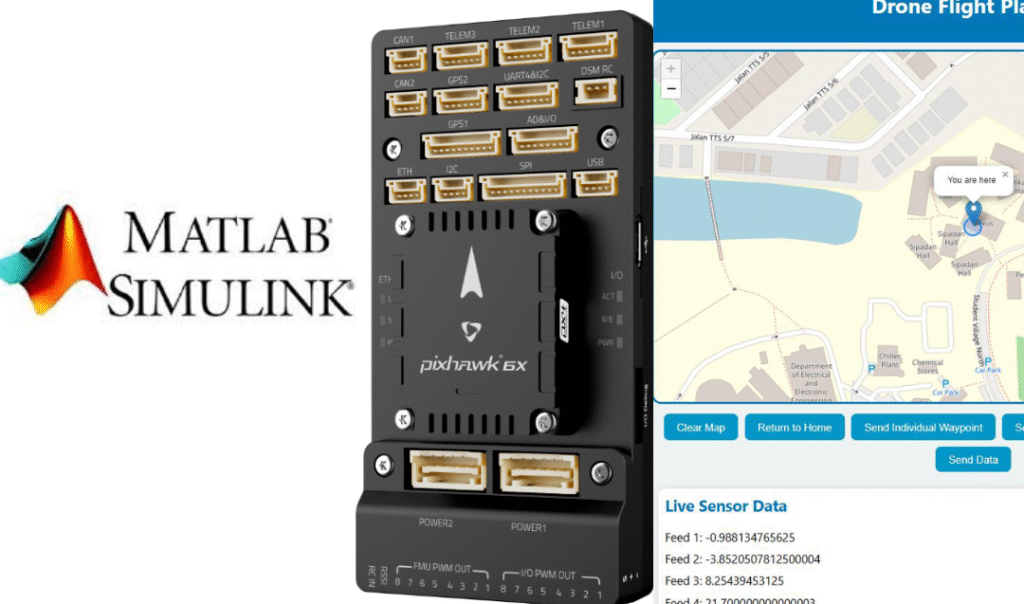
Drone-based Environmental monitoring
Utilized a Pixhawk controller with integrated sensors to transmit live data to a custom mobile app for analysis, while allowing real-time coordinate feedback to the drone.
Solidworks
The posts below highlight a selection of my Solidworks projects.
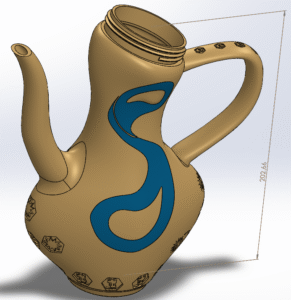
Teapot Modelling
The teapot was modeled in Solidworks by importing reference images and tracing to match the given dimensions along with the decorative symbol. The finished product is rendered with adjustments to lighting, reflections, shadows, and material properties to ensure the model blended naturally into the chosen environment.
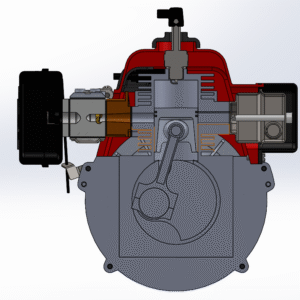
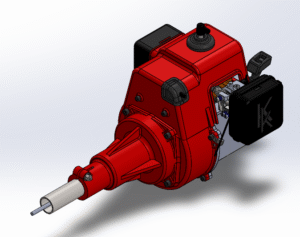
Two Stroke Engine
The project focuses on designing a two stroke engine for a chainsaw. The model includes the crankcase, connecting rod, crankshaft, and transfer ports. Moreover, bolts and nuts were also used at assembly points to provide ease of assembly.